The progressive development of infrastructure maintenance
Dr Jan Wessnitzer
Modern society is dependent on vital transport and utilities infrastructure. Worldwide, the number of rail passenger kilometers and cars on the road are predicted to double by 2040, putting immense pressure on current rail and road infrastructure and capacity. It is therefore more imperative than ever that this infrastructure is kept in good condition, not only to support the current demand, but to enable this growth.
We believe that the solution to this problem is applying condition analytics to large scale infrastructure. The is enabled by automating the temporal alignment and interpretation of measurements based on accurate localisation – condition mapping. This is a solution for large-scale linear infrastructure; such as railway tracks, roads, tunnels, bridges or pipelines; where it is infeasible to deploy thousands or millions of actual sensors.
Maintaining infrastructure is costly. In rail, for example, it is estimated that infrastructure maintenance accounts for ~50% of the overall cost of operating fleets [1]. World-wide, around $1.5tn is spent on maintaining and renewing infrastructure.
Condition analytics for the maintenance of large-scale linear infrastructure remains a challenge for infrastructure owners. Having accurate and up-to-date information about the infrastructure is required to guide the maintenance efforts.
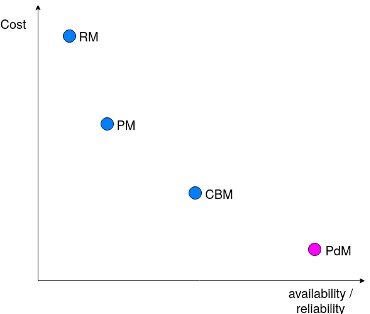
The main strategies for infrastructure maintenance can be summarised as follows:
RM: Reactive (or corrective) maintenance
PM: Preventative (or planned) maintenance
CBM: Condition-based (or rule-based) maintenance
PdM: Predictive maintenance
RM (reactive maintenance) refers to the case when a fault has already occurred, i.e., fix when broken. As illustrated in the Figure above, RM results in high cost and limited or no availability of the asset to the infrastructure owner. The infrastructure owner must now urgently react to infrastructure asset failure and schedule repairs, whilst experiencing asset downtime. For example, a fault on a rail track may lead to lengthy repairs during which the line needs to be closed. This will result in delays for rail customers and in increased capacity on other parts of the network due to the need to re-route trains and maintain a basic level of service.
In order to avoid the need to react, PM (preventative maintenance) applies scheduled repairs in order to reduce asset failure. This will still cause disruption in the service, but the infrastructure owner has had the opportunity to better plan for the disruption. A main criticism of this approach is that it requires worst-case scenarios about asset lifespans, resulting in significant inefficiencies.
In order to be more efficient, CBM (condition-based maintenance) approaches this problem by monitoring the infrastructure at regularly scheduled intervals. This way, no worst-case assumptions need to be made about infrastructure assets. Through experience, rules have been established that require repairs when certain thresholds of quality indices have been exceeded. Current CBM approaches simply take the measurements and compare them to some thresholds and, if the threshold is exceeded, a maintenance procedure is initiated. This has resulted in certain standards, e.g., EN13848-5, which prescribes recommendations on tolerance levels for defects and immediate action limits [2]. However, this rule-based approach remains sub-optimal.
PdM (predictive maintenance) enables continuous and just-in-time maintenance, only replacing assets that are about to fail. PdM combines current and historic measurements in order to estimate time to failure (TTF) and the remaining useful life (RUL) of an asset. PdM results in lower costs as repairs are limited to essential repairs only, resulting in increased availability of the infrastructure assets.
However, most current approaches to PdM are reliant on measurements gathered from fixed, or known, sensor locations. These can be quite complex units or lightweight IoT type sensors, but cannot be easily moved, and are prone to failing themselves. This is most evidently deficient in large-scale linear structures, where the degree of spatial sampling resolution for where a fault may occur is limited by the number of sensors. It is unfeasible to equip linear infrastructure with millions of sensors.
Predictive maintenance of rail condition (e.g., track geometry [3], overhead lines, etc.) and its degradation over time, for solving the problem of maintenance planning, has received little attention, other than for example, predictive maintenance of rolling stock assets, such as brake pads, doors, or air-conditioning units. However, condition mapping for monitoring rail condition will achieve the main goals of infrastructure owners. Indeed, track geometry degradation negatively affects track performance (e.g., smoothness of ride experience), safety (e.g., degradation to unacceptable levels may cause derailment), cost reduction (e.g., the remaining useful life of assets can be predicted, resulting in smaller maintenance costs due to fewer repair interventions), and asset uptime (e.g., improved asset lifespan).
Challenges of current approaches
To run a railway effectively the operator ought to be able to answer these basic questions:
What is the condition of my railway infrastructure right now?
When and where are failures going to happen?
What was the impact of maintenance just completed?
Currently, highly specialised sensors on a dedicated measurement vehicle (e.g., Network Rail New Measurement Train) are used to measure the condition of the track every four weeks on average. Thus, infrastructure owners have, at best, recent but, at worst, information that is outdated by 4 weeks. What is the RUL (remaining useful life) or TTF (time to failure) at this location today? Current approaches to predictive maintenance of linear features also struggle with data alignment. Without precisely aligned data from historic runs, the output from predictive maintenance algorithms will be sub-optimal at best and unreliable at worst, thus worthless for predictive modelling. Our condition mapping solution will help answer the above questions, and enable the deployment of simpler condition sensors, in combination with our localisation sensors to passenger trains, and lead to reporting the condition of the infrastructure on a daily basis (which is line with Network Rail Digital Railway strategy).
Condition mapping (enabled by precise localisation)
The MWV sensor uses the ground surface underneath a vehicle for localisation. Indeed, the precise localisation capabilities of the MWV sensor allow condition measurements to be tagged to a location on the ground (we call these features, i.e. the ground features). If the sensor (or vehicle) can be located very precisely at a specific time, condition measurements taken at that precise time can be tagged to the location features on the ground surface. This approach will solve the problem of data alignment. Traditional data alignment (using standard approaches such as cross-correlation) can only align data from the same sensor, or from multiple sensors combined into a single quality index (such that the waveforms of the signal from various runs can be aligned). However, mapping condition measurements (from whichever sensor) to single location will, for the first time, allow the precise alignment of data from different sensors (currently not possible with methods, such as cross-correlation).


Our underlying (patent pending) technology is the estimation of vehicle position by observing the trackbed surface in close proximity to the vehicle using an event camera. Above are a photograph of the trackbed (rails, sleepers, and ballast) and a visual map of a section of railway trackbed as created by our positioning sensor. Sleepers and rocks of the ballast are clearly visible.

As the train travels round the network, condition sensors are continuously taking measurements. These will be stored at precise map locations. In the figure above, two runs are automatically and precisely aligned.
The novelty is that the condition data will be located in a map coordinate frame, thus enabling precise data alignment; not only from historic runs, but this will enable the data alignment from multiple sensor streams and modalities into a condition map.
Condition analytics
We define condition analytics as condition mapping and predictive maintenance.
Condition analytics (enabled by Machines with Vision’s condition mapping) will improve current CBM and PdM approaches. Condition mapping will put the measurements obtained from monitoring runs into a map coordinate frame. Thus, subsequent measurements over several runs can be mapped to the same location and change detection can highlight changes in measurements and report the rates of change.
Combining various measurements and their precisely mapped changes over time will enable the development of predictive maintenance models. By combining domain knowledge from rail and road infrastructure maintenance, the latest Machine Learning algorithms, and our ability for precise condition mapping, powerful PdM models can help predict the RUL or TTF to unprecedented precision for linear infrastructure assets.
Predictive maintenance can reduce maintenance costs by 25% [4] and the predictive maintenance market is forecast to be worth $4.9bn globally by 2021 [4]. The main benefit of PdM is reduced repair time and unplanned downtime.
According to PwC [5], the main goals for companies deploying PdM are to:
improve asset uptime
reduce costs
reduce risks relating to safety, health, environment and quality
extend the lifetime of assets
improve customer satisfaction
Machines With Vision as a condition analytics solutions provider
During the early development of our positioning technology, and through discussion with industry contacts, we discovered that current systems for condition analytics (condition mapping and predictive maintenance) of track geometry aren’t as effective as infrastructure maintainers would like and that a solution for more effective condition analytics of track would be welcomely received.
Our unique (patent pending) approach utilises an event camera to observe the surface below the vehicle while travelling at speed, and we believe that the high-precision localisation derived from this, can radically improve upon existing predictive maintenance models. Our novel approach to localisation is 1 to 2 orders of magnitude more precise with 1 to 2 orders of magnitude less latency than current solutions. By tagging sensor data with our high-precision localisation, we are able to precisely align data (condition mapping) from historic runs and from different sensor streams (i.e. sensor modalities). In this way, we not only have an advantage over competing data alignment techniques, but we can benefit from cleaner data and build better predictive models, i.e. fuse historic multi-variate inputs for predicting RUL or TFF of infrastructure assets.
References:
[1] McKinsey, The rail sector’s changing maintenance game - How rail operators and rail OEMs can benefit from digital maintenance opportunities https://www.mckinsey.com/industries/travel-logistics-and-transport-infrastructure/our-insights/the-rail-sectors-changing-maintenance-game
[2] EN 13848-5 https://standards.globalspec.com/std/10257419/EN%2013848-5
[3] Track geometry https://en.wikipedia.org/wiki/Track_geometry
[4] Comtrade, Impact brief: Predictive maintenace uncovered – benefits, challenges, and use cases https://www.insightbrief.net/wp-content/uploads/Predictive-Maintenance-Uncovered%E2%80%93Benefits-Challenges-and-Use-Cases-InsightBrief.pdf?tagged=true
[5] PwC, Predictive maintenance 4.0 https://www.pwc.be/en/documents/20180926-pdm40-beyond-the-hype-report.pdf