Location and positioning in the railway (part 1)
You can download a pdf of the full article, updated to include feedback, here.
Why do we need accurate location?
Accurate positional data and location is needed for superior Infrastructure Monitoring (IM), leading to gains in process, safety, productivity, time and of course cost.
Executive summary
This series addresses the key points surrounding the data and devices needed to determine accurate position.
The issues caused by a reliance on GNSS/INS and their consequences
How other sources of position can not only bridge the gap, but enhance your data - across the board
The benefits of better positioned data for prediction and cross discipline analysis
The series we present will discuss the technologies used in railway positioning – and particularly those used in Infrastructure Measurement. We will discuss the difficulties in positioning in the railway environment, the types of corrections that are used currently; and finally discuss what is possible with newer technologies. We will also discuss how all of these benefit and hinder IM by looking at specific use cases of some of the technologies. We welcome feedback and discussion on all of these topics, the aim is to dispel any myths, address any misconceptions and quantify the art of the possible.
How does the railway use location?
Location is needed in the railways for (amongst other things):
Signalling
Timetabling / passenger information / delays
Infrastructure monitoring
Maintenance work
All of these have different accuracy requirements, but they all share the same common requirement, at a very minimum the track reported must be correct. When we talk about accuracy, we are usually talking about longitudinal error, the distance up or down the track (rather than a lateral or sideways error) - the railway is in effect 1 dimensional, a train cannot move left/right away from a track unless it reaches S&C. When the wrong track is selected, the position is just plain wrong - we have moved away from the 1-dimensional map, and we can consider the error to be effectively infinite. This may be acceptable sometimes as it may well be that every inch does not need to be reported on - but on the flip side, this then implies that the incorrect position must be known as such - i.e., we must know it is incorrect. This is quite often where the issue can be, how do we deal with an incorrect position (and therefore measurement) if we don’t know that it is incorrect?
With traditional fixed block signalling, the problem is solved using track circuits, i.e., we know exactly which track a train is on because it closes an electrical circuit. What we don’t know (or need to know) is where along that circuit it is. If we extend this to timetabling and passenger information, we can supplement the track circuit information with an approximate position from either GNSS or some kind of wheel encoder to tell us (within a tolerance) where that train is along the circuit. This information need not be very accurate - these systems consider errors of over a minute, which is potentially hundreds of metres.
More modern approaches to signalling, such as ETCS, consume data from other sensors to provide continuous position. The same kinds of data provide position for DAS and ATO, these trains usually have some form of GNSS alongside a wheel encoder/tachometer, they take external location correction and updates from balises installed on the physical infrastructure. The locations of these balises are usually surveyed-in to high absolute accuracy and are placed frequently along the track. When coupled with an accurate timetable, this gives a location of the train to a very good accuracy. The aim is often to have this accuracy at a metre or so.
When it comes to IM, suddenly, the requirements change. We need to know where a fault is so that we can either a) monitor it or b) fix it. In the first instance this drives the accuracy requirement by saying “given a set of faults along a track, what is the largest distance apart that faults can be for me to categorically state that one is identifiable from a set of faults captured at another time”. In the second instance the accuracy requirement is similar, “given a fault, what is the largest error allowable in the measurement that permits a worker to find that fault with a certain toolset (which could also have a locational error)”.
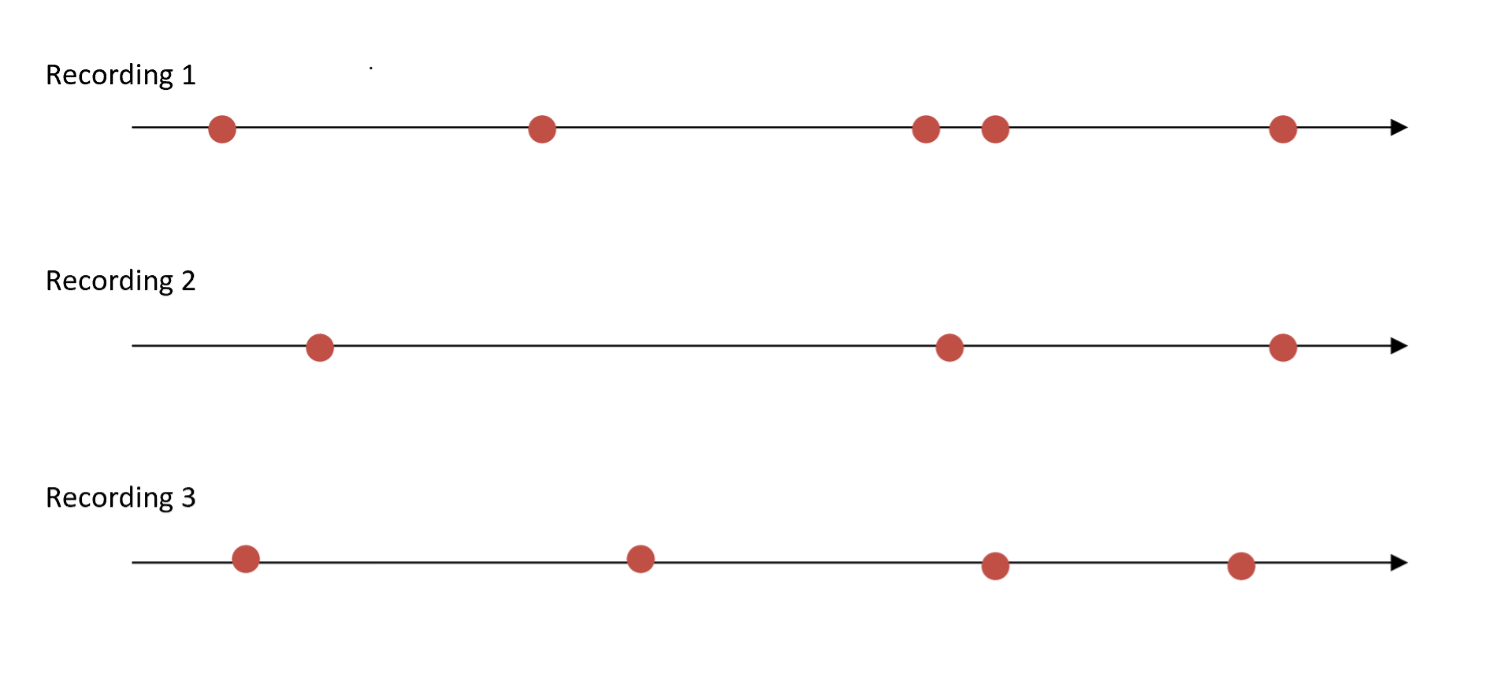
Consider the image above, we have 3 recordings - for the first there are five faults, what we need to know is for the subsequent recordings, which faults found are the same as those on the first recording. If the positional error is large - then this could be a difficult task, especially if there are faults grouped closely (tighter than the error in the positioning system) – or even a different number of faults (new faults or faults that have been remedied).
Now, both statements come with the caveat that we still need to categorically know which track the fault was on. This is the first quandary that we are presented with in IM, not only do we need to know where we are along a track, we need to know if the track we think we are on virtually matches the physical track the train has travelled on. This is important for many reasons, not just in terms of fault finding and remedial work, but fault classification due to track category information, line speed and so on.
How has IM been positioned traditionally?
We’ve come a long way from synchronising mileposts by pushing a button whilst looking out of the window. GNSS and Inertial Navigation has given us the potential to locate down to a few centimetres - but never all the time (in fact, infrequently in the railway). GNSS itself has evolved in the last 20-30 years, this really started when the US removed selective availability from the signals and consumers (i.e., non-military) were able to use dual (and multi) frequency receivers to get good positional accuracy.
So where is the problem?